OpenCV Notes 01 | Feature Detection
Contents
0. Understanding Features
What are the main features in an image? How can finding those features be useful to us?
Jigsaw Puzzle Game
- How do you play jigsaw puzzles?
- How do you arrange lots of scrambled image pieces into a big single image?
- How can you stitch a lot of natural images to a single image?

Answers:
- We are looking for specific patterns or specific features which are unique, can be easily tracked and can be easily compared.
- A and B are flat surfaces and they are spread over a lot of area.
- It is difficult to find the exact location of these patches.
- C and D are edges of the building. You can find an approximate location, but exact location is still difficult.
- This is because the pattern is same everywhere along the edge.
- An edge is therefore better feature compared to flat area, but not good enough.
- E and F are some corners of the building. And they can be easily found. So they can be considered as good features.
- 好的 Feature 难以被定义,但小孩子都可以做到 —— 那便是拼拼图先去拼的那四个角,边和独特的拼图块。
Feature Detection
Feature Detection is Looking for features (regions) in images which have maximum variation when moved (by a small amount) in all regions around it.
Feature Description
We take a region around the feature, we explain it in our own words,
- like “upper part is blue sky, lower part is region from a building, on that building there is glass etc”
- Once you have the features and its description, you can find same features in all images and align(match) them, stitch them together
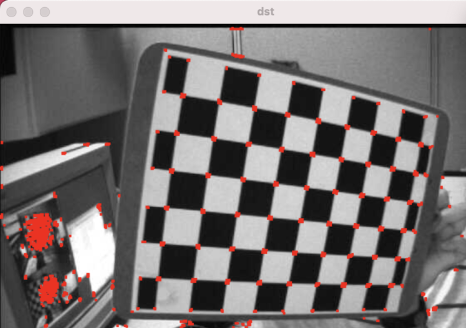
1. Harris Corner Detection
Corners are regions in the image with large variation in intensity in all the directions.
- One early attempt to find these corners was done by Chris Harris & Mike Stephens in their paper A Combined Corner and Edge Detector in 1988,
- so now it is called the Harris Corner Detector.
Concepts (Math)
OpenCV Implementation
OpenCV has the function cv.cornerHarris() for this purpose. Its arguments are:
img- Input image. It should be grayscale and float32 type.blockSize- It is the size of neighbourhood considered for corner detection ksize - Aperture parameter of the Sobel derivative used.alpha- Harris detector free parameter in the equation.
|
|
Shi-Tomasi Corner Detector
Later in 1994, J. Shi and C. Tomasi made a small modification to it in their paper Good Features to Track which shows better results compared to Harris Corner Detector.
- The scoring function in Harris Corner Detector was given by: $$R=\lambda_0 \lambda_1 - \alpha(\lambda_0 + \lambda_1)^2$$
- Instead of this, Shi-Tomasi proposed: $$R = min(\lambda_1, \lambda_2)$$