The alpha shape is a generalization of a convex hull.
1.1. Convex Hull
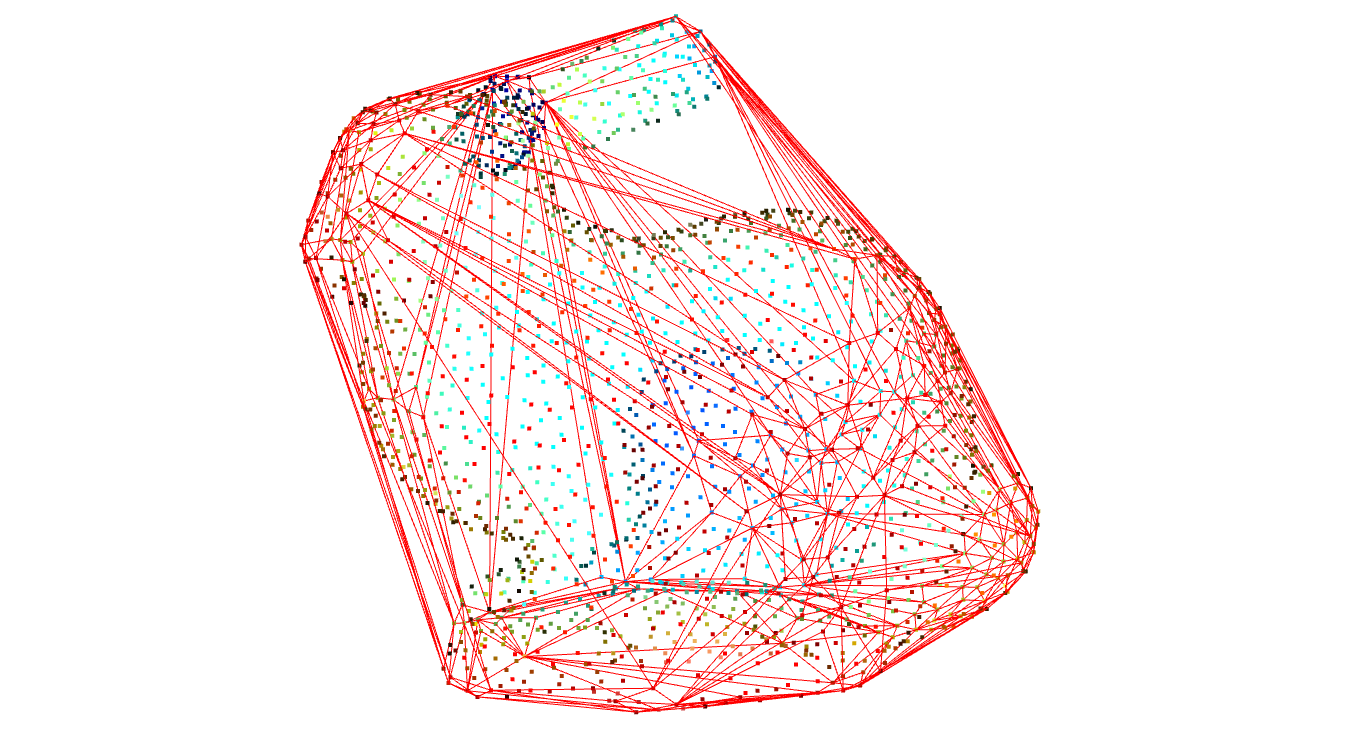
The Convex Hull (凸包) of a point cloud is the smallest convex set that contains all points.
Open3D contains compute_convex_hull() that computes the convex hull of a point cloud
1
2
3
4
5
6
7
8
9
10
11
bunny=o3d.data.BunnyMesh()mesh=o3d.io.read_triangle_mesh(bunny.path)mesh.compute_vertex_normals()# Sample a Point Cloud from Meshpcd=mesh.sample_points_poisson_disk(number_of_points=2000)# Compute the convex hull that is returned as a triangle mesh.hull,_=pcd.compute_convex_hull()# Visualize the convex hull as a red LineSet.hull_ls=o3d.geometry.LineSet.create_from_triangle_mesh(hull)hull_ls.paint_uniform_color((1,0,0))o3d.visualization.draw_geometries([pcd,hull_ls])
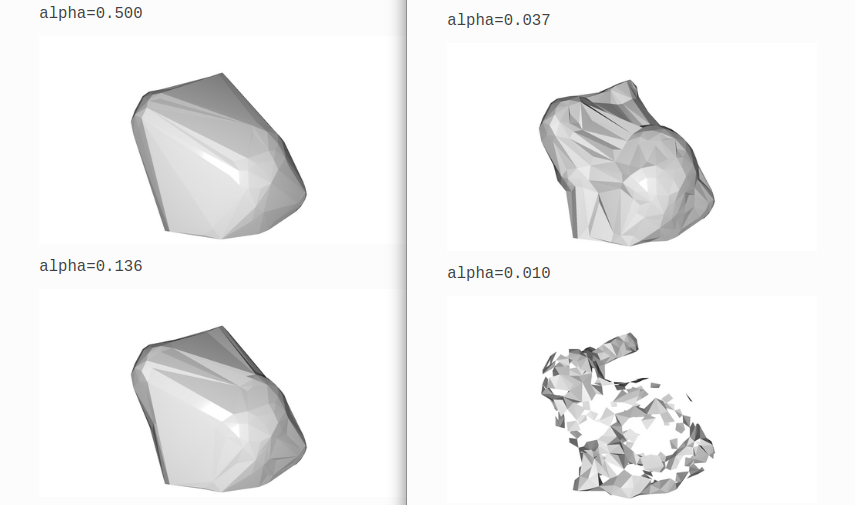
1.2. Parameter: Alpha
The “best” Alpha is found out by trial-and-error[3]
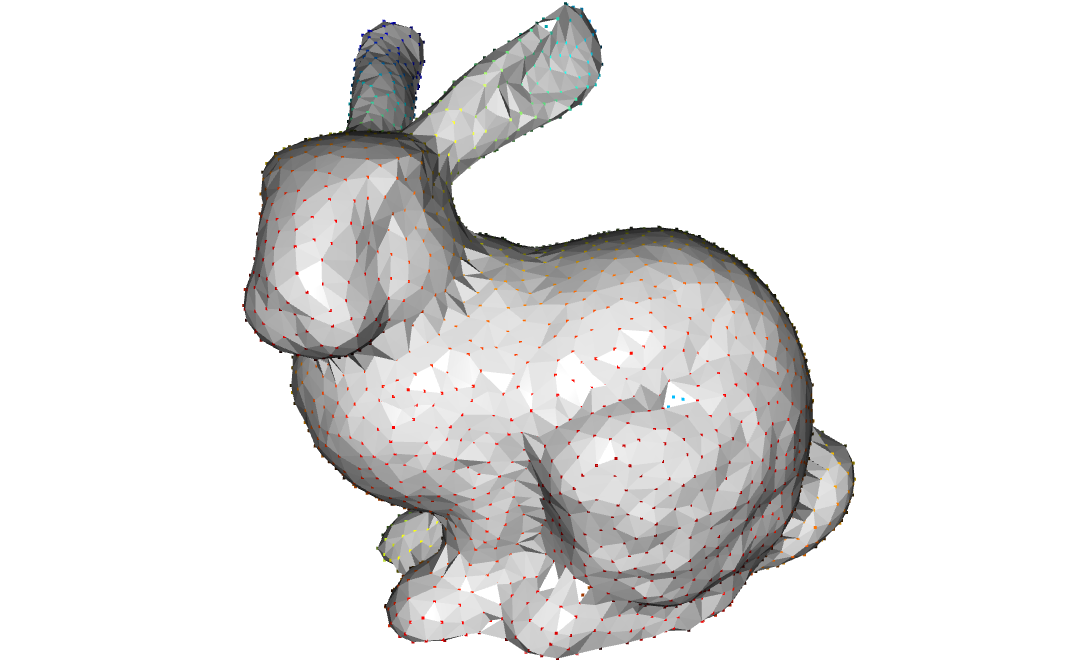
Intuitively, think of a 3D ball with a given radius that we drop on the point cloud.
If it hits any 3 points (and it does not fall through those 3 points) it creates a triangles.
Then, the algorithm starts pivoting from the edges of the existing triangles and
every time it hits 3 points where the ball does not fall through, we create another triangle.
1
2
3
4
5
6
7
# The method accepts a list of radii as parameter# that corresponds to the radii of the individual balls# that are pivoted on the point cloud.radii=[0.005,0.01,0.02,0.04]rec_mesh=o3d.geometry.TriangleMesh.create_from_point_cloud_ball_pivoting(pcd,o3d.utility.DoubleVector(radii))o3d.visualization.draw_geometries([pcd,rec_mesh])
3. Poisson Surface Reconstruction
The Poisson surface reconstruction methodsolves a regularized optimization problem to obtain a smooth surface.
since the points of the PointCloud are also the vertices of the resulting triangle mesh, they produce non-smooth results without any modifications.
An important parameter of the function is depth
that defines the depth of the octree used for the surface reconstruction and hence implies the resolution of the resulting triangle mesh.
A higher depth value means a mesh with more details
1
2
3
4
5
6
7
8
9
10
11
12
13
eagle=o3d.data.EaglePointCloud()pcd=o3d.io.read_point_cloud(eagle.path)print(pcd)# PointCloud with 796825 points.o3d.visualization.draw_geometries([pcd])print('run Poisson surface reconstruction')witho3d.utility.VerbosityContextManager(o3d.utility.VerbosityLevel.Debug)ascm:mesh,densities=o3d.geometry.TriangleMesh.create_from_point_cloud_poisson(pcd,depth=9)print(mesh)# TriangleMesh with 563112 points and 1126072 triangles.o3d.visualization.draw_geometries([mesh])
Remove Low Density Vertices
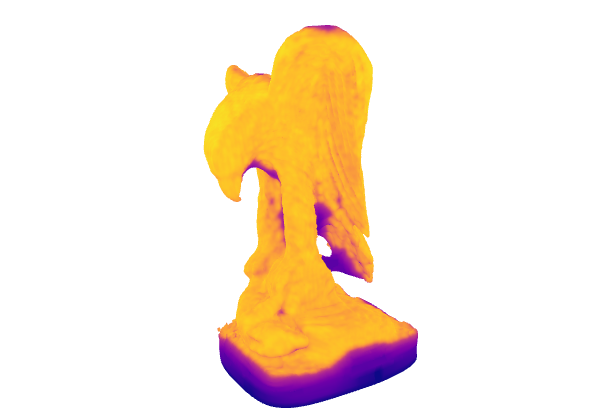
Poisson surface reconstruction will also create triangles in areas of low point density, and even extrapolates into some areas (see bottom of the eagle output above).
The create_from_point_cloud_poisson()`` function has a densities` return value that indicates for each vertex the density.
A low density value means that the vertex is only supported by a low number of points from the input point cloud.
Violet indicates low density and yellow indicates a high density.
1
2
3
4
5
6
7
8
9
print('remove low density vertices')
# remove all vertices (and connected triangles)
# that have a lower density value
# than the 0.01 quantile of all density values.
vertices_to_remove = densities < np.quantile(densities, 0.01)
mesh.remove_vertices_by_mask(vertices_to_remove)
print(mesh)
# TriangleMesh with 557480 points and 1113213 triangles.
# before: TriangleMesh with 563112 points and 112