Goal:build and train a basic GAN that can generate hand-written images of digits (0-9) by using Pytorch
Build the generator and discriminator components of a GAN from scratch.
Create generator and discriminator loss functions.
Train the GAN and visualize the generated images.
0. Import Packages and visualizer function
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
importtorchfromtorchimportnnfromtqdm.autoimporttqdmfromtorchvisionimporttransformsfromtorchvision.datasetsimportMNIST# Training datasetfromtorchvision.utilsimportmake_gridfromtorch.utils.dataimportDataLoaderimportmatplotlib.pyplotasplttorch.manual_seed(0)# Set for testing purposes, please do not change!defshow_tensor_images(image_tensor,num_images=25,size=(1,28,28)):'''
Function for visualizing images: Given a tensor of images, number of images, and
size per image, plots and prints the images in a uniform grid.
'''image_unflat=image_tensor.detach().cpu().view(-1,*size)image_grid=make_grid(image_unflat[:num_images],nrow=5)plt.imshow(image_grid.permute(1,2,0).squeeze())plt.show()
1. Build the Generator Component
Create a function to make a single layer/block for the generator’s neural network.
Each block should include a linear transformation to map to another shape,
a batch normalization for stabilization,
and finally a non-linear activation function (you use a ReLU here) so the output can be transformed in complex ways.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
defget_generator_block(input_dim,output_dim):'''
Function for returning a block of the generator's neural network
given input and output dimensions.
Parameters:
input_dim: the dimension of the input vector, a scalar
output_dim: the dimension of the output vector, a scalar
Returns:
a generator neural network layer, with a linear transformation
followed by a batch normalization and then a relu activation
'''returnnn.Sequential(nn.Linear(input_dim,output_dim),nn.BatchNorm1d(output_dim),nn.ReLU(inplace=True),)
1.1. Build the Generator class
It will take 3 values:
the noise vector dimension
the image dimension
the initial hidden dimension
Using these values, the generator will build a neural network with 5 layers/blocks.
Beginning with the noise vector, the generator will apply non-linear transformations via the block function until the tensor is mapped to the size of the image to be outputted (the same size as the real images from MNIST).
The final layer does not need a normalization or activation function, but does need to be scaled with a sigmoid function.
Finally, implement a forward pass function that takes in a noise vector and generates an image of the output dimension using the neural network.
classGenerator(nn.Module):'''
Generator Class
Values:
z_dim: the dimension of the noise vector, a scalar
im_dim: the dimension of the images, fitted for the dataset used, a scalar
(MNIST images are 28 x 28 = 784 so that is your default)
hidden_dim: the inner dimension, a scalar
'''def__init__(self,z_dim=10,im_dim=784,hidden_dim=128):super(Generator,self).__init__()# Build the neural networkself.gen=nn.Sequential(get_generator_block(z_dim,hidden_dim),get_generator_block(hidden_dim,hidden_dim*2),get_generator_block(hidden_dim*2,hidden_dim*4),get_generator_block(hidden_dim*4,hidden_dim*8),# the final layer needs to be scaled with a sigmoid functionnn.Linear(hidden_dim*8,im_dim),nn.Sigmoid())defforward(self,noise):'''
Function for completing a forward pass of the generator:
Given a noise tensor, returns generated images.
Parameters:
noise: a noise tensor with dimensions (n_samples, z_dim)
'''returnself.gen(noise)# Needed for gradingdefget_gen(self):'''
Returns:
the sequential model
'''returnself.gen
1.2. Create Noise Vectors
To be able to use the Generator, we need to create noise vectors.
The noise vector z has the important role of making sure the images generated (from the same class) don’t all look the same
think of it as a random seed.
Since multiple images will be processed per pass, you will generate all the noise vectors at once.
defget_noise(n_samples,z_dim,device='cpu'):'''
Function for creating noise vectors: Given the dimensions (n_samples, z_dim),
creates a tensor of that shape filled with random numbers from the normal distribution.
Parameters:
n_samples: the number of samples to generate, a scalar
z_dim: the dimension of the noise vector, a scalar
device: the device type
'''# NOTE: To use this on GPU with device='cuda', make sure to pass the device# argument to the function you use to generate the noise.returntorch.randn(n_samples,z_dim,device=device)# Verify the noise vector functiondeftest_get_noise(n_samples,z_dim,device='cpu'):noise=get_noise(n_samples,z_dim,device)# Make sure a normal distribution was usedasserttuple(noise.shape)==(n_samples,z_dim)asserttorch.abs(noise.std()-torch.tensor(1.0))<0.01assertstr(noise.device).startswith(device)test_get_noise(1000,100,'cpu')iftorch.cuda.is_available():test_get_noise(1000,32,'cuda')print("Success!")
2. Build the Discriminator Component
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
defget_discriminator_block(input_dim,output_dim):'''
Discriminator Block
Function for returning a neural network of the discriminator given input and output dimensions.
Parameters:
input_dim: the dimension of the input vector, a scalar
output_dim: the dimension of the output vector, a scalar
Returns:
a discriminator neural network layer, with a linear transformation
followed by an nn.LeakyReLU activation with negative slope of 0.2
(https://pytorch.org/docs/master/generated/torch.nn.LeakyReLU.html)
'''returnnn.Sequential(nn.Linear(input_dim,output_dim),#Layer 1nn.LeakyReLU(0.2,inplace=True))
2.1. Build the Discriminator class
The discriminator will build a neural network with 4 layers.
It will start with the image tensor and transform it until it returns a single number (1-dimension tensor) output.
This output classifies whether an image is fake or real.
Finally, to use discrimator’s neural network you are given a forward pass function that takes in an image tensor to be classified.
classDiscriminator(nn.Module):'''
Discriminator Class
Values:
im_dim: the dimension of the images, fitted for the dataset used, a scalar
(MNIST images are 28x28 = 784 so that is your default)
hidden_dim: the inner dimension, a scalar
'''def__init__(self,im_dim=784,hidden_dim=128):super(Discriminator,self).__init__()self.disc=nn.Sequential(get_discriminator_block(im_dim,hidden_dim*4),get_discriminator_block(hidden_dim*4,hidden_dim*2),get_discriminator_block(hidden_dim*2,hidden_dim),# transform the final output into a single value,# so add one more linear map.nn.Linear(hidden_dim,1))defforward(self,image):'''
Function for completing a forward pass of the discriminator: Given an image tensor,
returns a 1-dimension tensor representing fake/real.
Parameters:
image: a flattened image tensor with dimension (im_dim)
'''returnself.disc(image)# Needed for gradingdefget_disc(self):'''
Returns:
the sequential model
'''returnself.disc
3. Set Parameters and load the MNIST dataset
1
2
3
4
5
6
7
8
9
10
11
12
13
# Set your parameterscriterion=nn.BCEWithLogitsLoss()# the loss functionn_epochs=200# the number of times you iterate through the entire dataset when trainingz_dim=64# the dimension of the noise vectordisplay_step=500# how often to display/visualize the imagesbatch_size=128# the number of images per forward/backward passlr=0.00001# the learning ratedevice='cuda'# the device type, here using a GPU (which runs CUDA), not CPU# Load MNIST dataset as tensorsdataloader=DataLoader(MNIST('.',download=False,transform=transforms.ToTensor()),batch_size=batch_size,shuffle=True)
4. Initialize the generator, discriminator, and optimizers.
Note that each optimizer only takes the parameters of one particular model, since we want each optimizer to optimize only one of the models.
Since the generator is needed when calculating the discriminator’s loss, you will need to call .detach() on the generator result to ensure that only the discriminator is updated
This is how the discriminator and generator will know how they are doing and improve themselves.
Discriminator’s Loss
We need a ‘ground truth’ tensor in order to calculate the loss.
For example, a ground truth tensor for a fake image is all zeros.
defget_disc_loss(gen,disc,criterion,real,num_images,z_dim,device):'''
Return the loss of the discriminator given inputs.
Parameters:
gen: the generator model, which returns an image given z-dimensional noise
disc: the discriminator model, which returns a single-dimensional prediction of real/fake
criterion: the loss function, which should be used to compare
the discriminator's predictions to the ground truth reality of the images
(e.g. fake = 0, real = 1)
real: a batch of real images
num_images: the number of images the generator should produce,
which is also the length of the real images
z_dim: the dimension of the noise vector, a scalar
device: the device type
Returns:
disc_loss: a torch scalar loss value for the current batch
'''# Create noise vectorsfake_noise=get_noise(num_images,z_dim,device=device)# generate a batch (num_images) of fake images.fake=gen(fake_noise)# Get the discriminator's prediction of the fake imagedisc_fake_pred=disc(fake.detach())# calculate the lossdisc_fake_loss=criterion(disc_fake_pred,torch.zeros_like(disc_fake_pred))# Get the discriminator's prediction of the real imagedisc_real_pred=disc(real)# calculate the loss.disc_real_loss=criterion(disc_real_pred,torch.ones_like(disc_real_pred))# Calculate the discriminator's loss by averaging the real and fake lossdisc_loss=(disc_fake_loss+disc_real_loss)/2returndisc_loss
defget_gen_loss(gen,disc,criterion,num_images,z_dim,device):'''
Return the loss of the generator given inputs.
Parameters:
gen: the generator model, which returns an image given z-dimensional noise
disc: the discriminator model, which returns a single-dimensional prediction of real/fake
criterion: the loss function, which should be used to compare
the discriminator's predictions to the ground truth reality of the images
(e.g. fake = 0, real = 1)
num_images: the number of images the generator should produce,
which is also the length of the real images
z_dim: the dimension of the noise vector, a scalar
device: the device type
Returns:
gen_loss: a torch scalar loss value for the current batch
'''# Create noise vectors and generate a batch of fake images.fake_noise=get_noise(num_images,z_dim,device=device)# Get the discriminator's prediction of the fake image.fake=gen(fake_noise)# Calculate the generator's loss.disc_fake_pred=disc(fake)# the generator wants the discriminator to think that its fake images are realgen_loss=criterion(disc_fake_pred,torch.ones_like(disc_fake_pred))returngen_loss
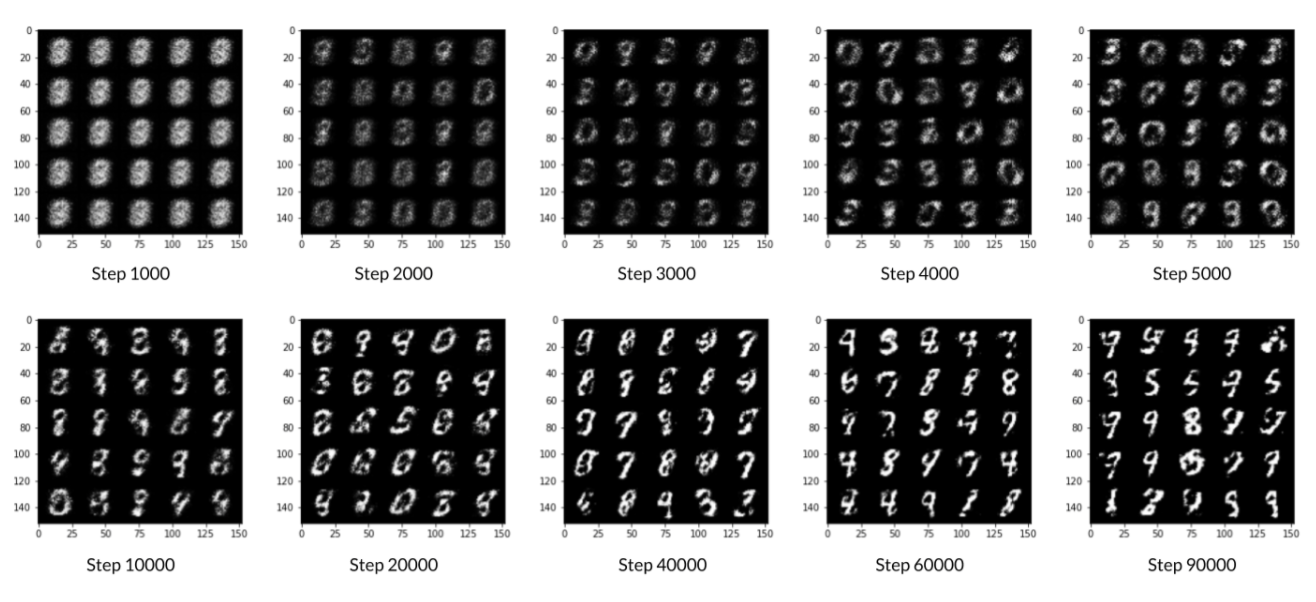
6. Train the Generative Adversarial Network
For each epoch, we process the entire dataset in batches. For every batch, we need to update the discriminator and generator using their loss.
Batches are sets of images that will be predicted on before the loss functions are calculated (instead of calculating the loss function after each image).
It’s also often the case that the discriminator will outperform the generator, especially at the start, because its job is easier.
It’s important that neither one gets too good (that is, near-perfect accuracy), which would cause the entire model to stop learning.
Balancing the two models is actually remarkably hard to do in a standard GAN.
cur_step=0mean_generator_loss=0mean_discriminator_loss=0test_generator=True# Whether the generator should be testedgen_loss=Falseerror=Falseforepochinrange(n_epochs):# Dataloader returns the batchesforreal,_intqdm(dataloader):cur_batch_size=len(real)# Flatten the batch of real images from the datasetreal=real.view(cur_batch_size,-1).to(device)### Update discriminator #### Zero out the gradients before backpropagationdisc_opt.zero_grad()# Calculate discriminator lossdisc_loss=get_disc_loss(gen,disc,criterion,real,cur_batch_size,z_dim,device)# Update gradientsdisc_loss.backward(retain_graph=True)# Update optimizerdisc_opt.step()# For testing purposes, to keep track of the generator weightsiftest_generator:old_generator_weights=gen.gen[0][0].weight.detach().clone()### Update generator #### Zero out the gradients.gen_opt.zero_grad()# Calculate the generator lossgen_loss=get_gen_loss(gen,disc,criterion,cur_batch_size,z_dim,device)# Backprop through the generatorgen_loss.backward()# Update the gradients and optimizer.gen_opt.step()# For testing purposes, to check that your code changes the generator weightsiftest_generator:try:assertlr>0.0000002or(gen.gen[0][0].weight.grad.abs().max()<0.0005andepoch==0)asserttorch.any(gen.gen[0][0].weight.detach().clone()!=old_generator_weights)except:error=Trueprint("Runtime tests have failed")# Keep track of the average discriminator lossmean_discriminator_loss+=disc_loss.item()/display_step# Keep track of the average generator lossmean_generator_loss+=gen_loss.item()/display_step### Visualization code ###ifcur_step%display_step==0andcur_step>0:print(f"Step {cur_step}: Generator loss: {mean_generator_loss}, discriminator loss: {mean_discriminator_loss}")fake_noise=get_noise(cur_batch_size,z_dim,device=device)fake=gen(fake_noise)show_tensor_images(fake)show_tensor_images(real)mean_generator_loss=0mean_discriminator_loss=0cur_step+=1