– Simple NN
– Deep NN
– CNN, U-Net, YOLO
– PointNets ==> 3D object dection
– Pose Estimation
1. Neural Network History
Neural networks rose to fame (成名) in the late 1980s, fall from favor (失宠) because some “new methods” such as SVMs, Boosting, and Random Forests were more automatic and outperformed poorly-trained neural networks on many problems for the first decade in the new millennium (2000 - 2010)
however, neural networks resurfaced after 2010 with the new name deep learning, with new architectures, the availability of ever-larger training datasets,
and a string of success stories on some niche problems such as
image and video classification (by Convolutional Neural Networks)
speech and text modeling (by Recurrent Neural Networks)
2. Single Layer Neural Networks (Sec 10.1)
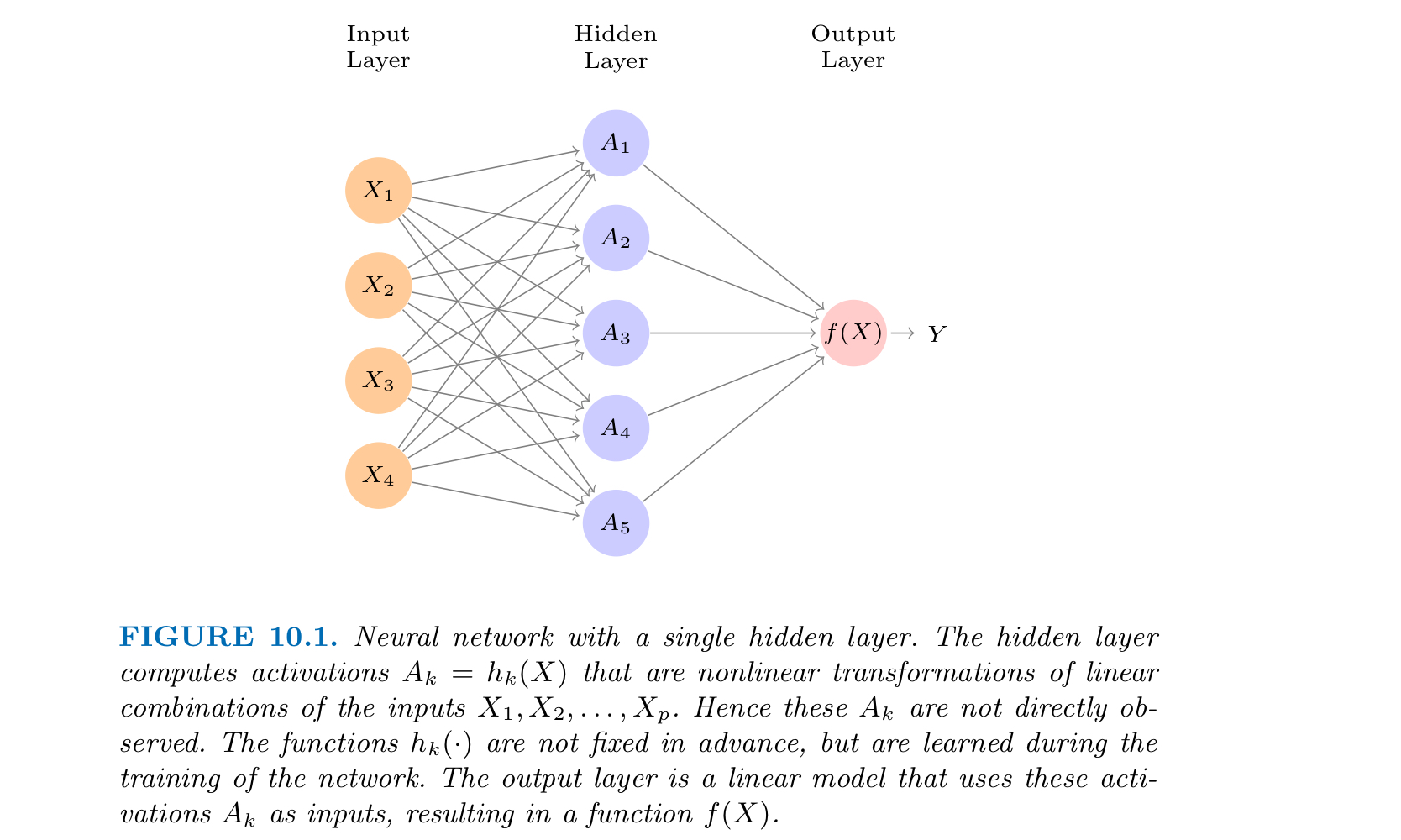
A neural network takes an input vector of p variables, $X = (X_1, X_2, X_3, \cdots, X_p)$, and builds a complex nonlinear function $f(X)$ to predict the response Y.
The name Neural Networks originally derived from thinking of these hidden units as analogous to neurons in the brain:
nodes represent inputs, activations or outputs
edges represent weights or biases
values of the activations $A_k$ close to one are firing, while those close to zero are silent
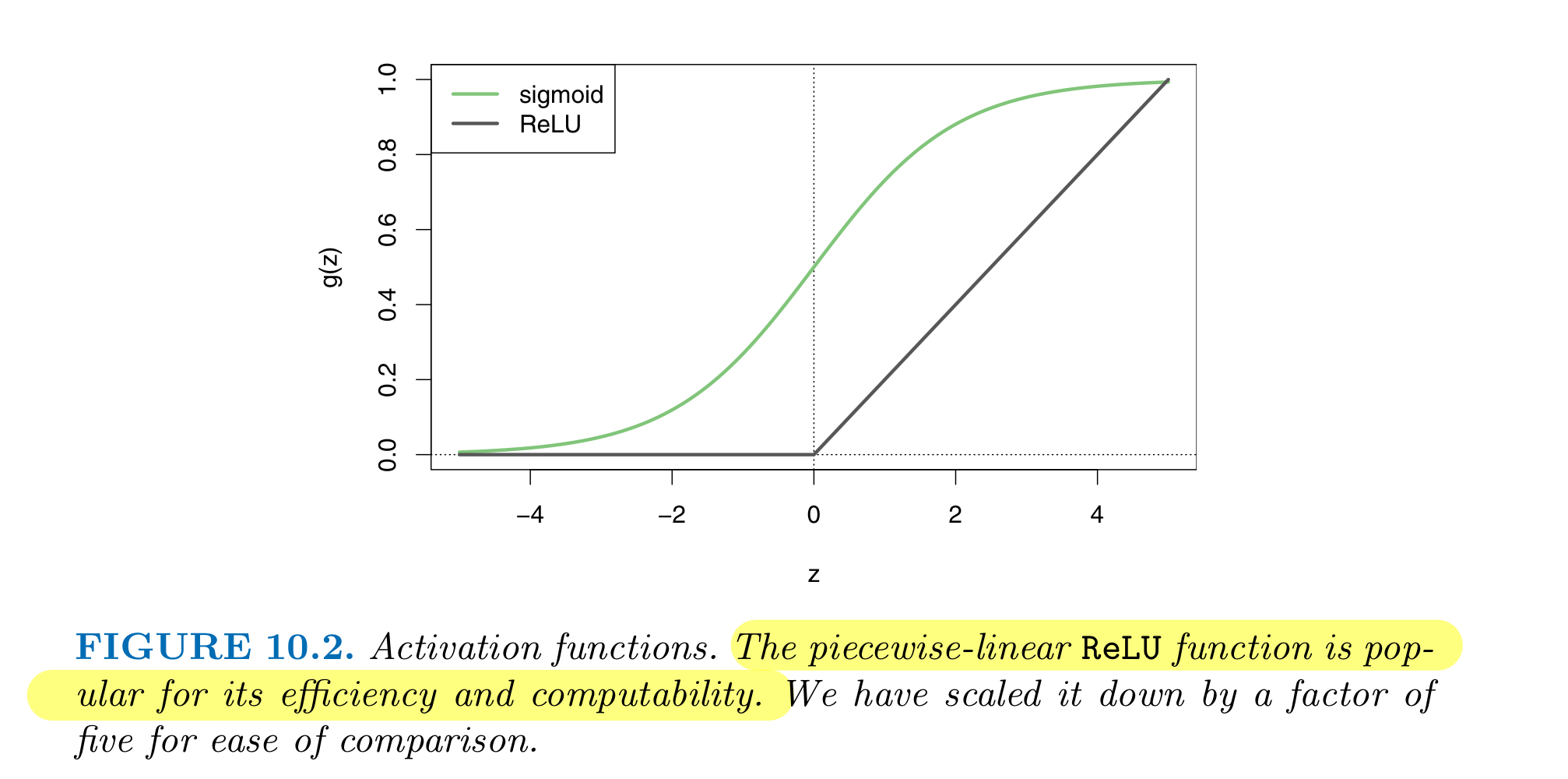
Activation Functions
We can think of each $A_k$ as a different
nonlinear transformation of linear combinations of the input features
much like the basis functions (in Sec 7.3) that can be applied to X to fit a non-linear model.
not fixed in advance, but will be learned during the training (computing) of the network.
Why Nonlinear?
otherwise, the neural network is just computing and outputting a linear activation function of the input X
then, the hidden layers are useless.
Rules of Thumb:
Sigmoid activation function can convert a linear function into probabilities between 0 and 1
only works well in the output layer for Binary Classification (0/1) Problem
tanh activation function works better than the sigmoid function because the mean is close to 0 rather than 0.5
Centering the Data so that makes the learning for the next layer a litter bit easier
Disadvantage: if Z is either very large or very small, then the derivative (slope of function) becomes very small
this can slow down Gradient Descent
Relu(Rectified Linear Unit) activation function can be computed and stored more efficiently in modern neural networks
default choice of activation function for hidden layers
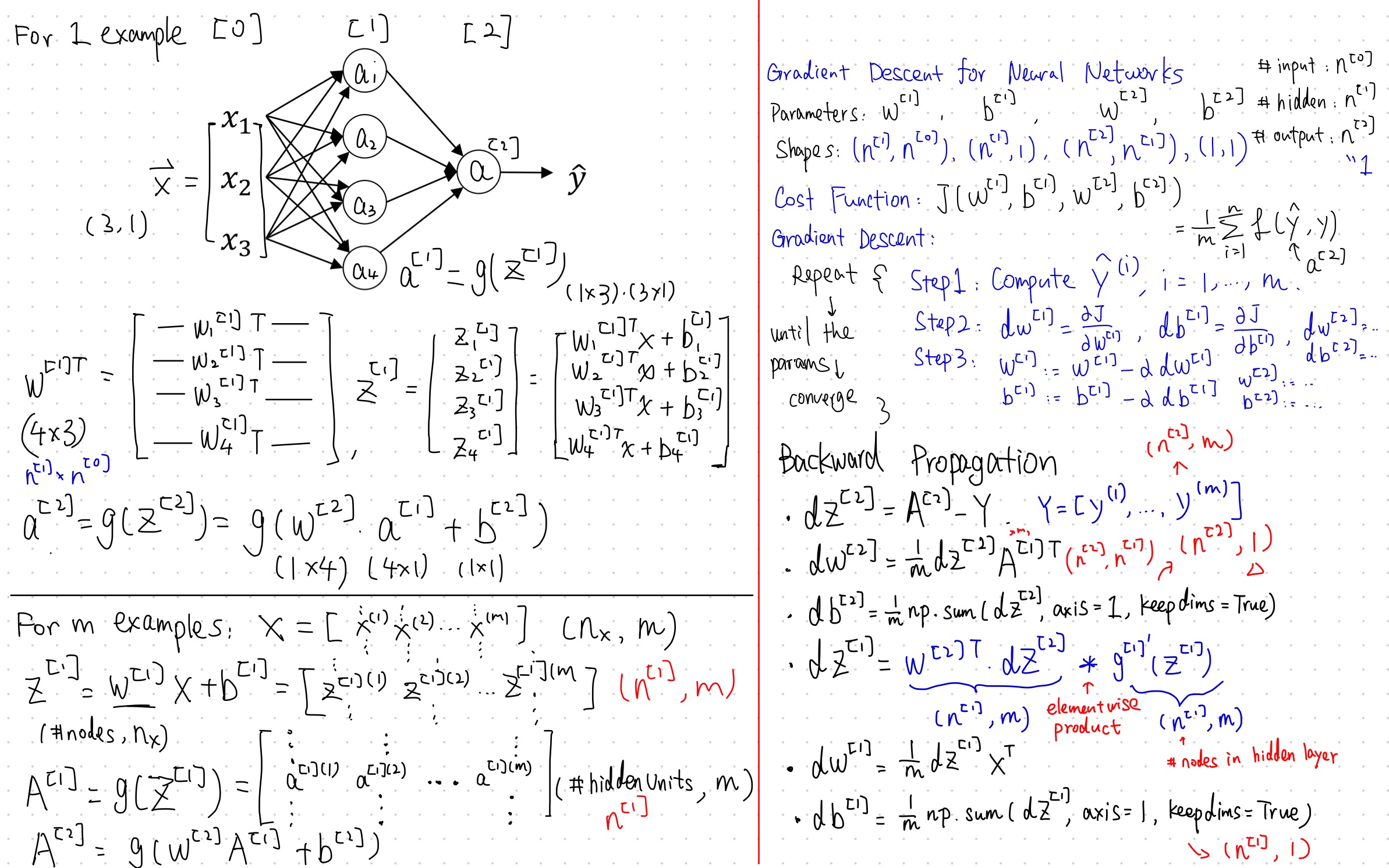
Forward and Backward Propagation
Gradient Descent and Learning Rate
Smaller Learning Rate may make the Gradient Descent Algorithm converge to the minimum:
While a bad Learning Rate causes diverging:
3. Build a Single Layer Neural Network Step by Step
Step 1. Define the Neural Network Structure
Define three variables:
n_x: the size of the input layer (shapes of X)
n_h: the size of the hidden layer (set this to 4)
n_y: the size of the output layer (shapes of Y)
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
deflayer_sizes(X,Y):"""
Arguments:
X -- input dataset of shape (input size, number of examples)
Y -- labels of shape (output size, number of examples)
Returns:
n_x -- the size of the input layer
n_h -- the size of the hidden layer
n_y -- the size of the output layer
"""n_x=X.shape[0]# size of input layern_h=4n_y=Y.shape[0]# size of output layerreturn(n_x,n_h,n_y)
Step 2. Initialize the Parameters
If we initialize weights to 0, all hidden units are completely identical (symmetric)
they compute exact same function
we need to initialize the random and small parameters
if the weights are too large, then the slope of the gradient will be very small (flat parts of activation functions)
Make sure the parameters' sizes are right
Use np.random.randn(a,b)*0.01 to randomly initialize a matrix of shape (a,b)
Use np.zeros((a,b)) to initialize a matrix of shape (a,b) with zeros.
definitialize_parameters(n_x,n_h,n_y):"""
Argument:
n_x -- size of the input layer
n_h -- size of the hidden layer
n_y -- size of the output layer
Returns:
params -- python dictionary containing your parameters:
W1 -- weight matrix of shape (n_h, n_x)
b1 -- bias vector of shape (n_h, 1)
W2 -- weight matrix of shape (n_y, n_h)
b2 -- bias vector of shape (n_y, 1)
"""np.random.seed(2)# we set up a seed so that your output matches ours although the initialization is random.W1=np.random.randn(n_h,n_x)*0.01b1=np.zeros((n_h,1))W2=np.random.randn(n_y,n_h)*0.01b2=np.zeros((n_y,1))assert(W1.shape==(n_h,n_x))assert(b1.shape==(n_h,1))assert(W2.shape==(n_y,n_h))assert(b2.shape==(n_y,1))parameters={"W1":W1,"b1":b1,"W2":W2,"b2":b2}returnparameters
Step 3. Forward Propagation
Retrieve each parameter from the dictionary “parameters” (which is the output of initialize_parameters()) by using parameters[".."].
Compute $Z^1,A^1,Z^2,A^2$ and store them in cache, which will be used as an input to the backpropagation function
defforward_propagation(X,parameters):"""
Argument:
X -- input data of size (n_x, m)
parameters -- python dictionary containing your parameters (output of initialization function)
Returns:
A2 -- The sigmoid output of the second activation
cache -- a dictionary containing "Z1", "A1", "Z2" and "A2"
"""# Retrieve each parameter from the dictionary "parameters"W1=parameters["W1"]b1=parameters["b1"]W2=parameters["W2"]b2=parameters["b2"]# Implement Forward Propagation to calculate A2 (probabilities)Z1=np.dot(W1,X)+b1A1=np.tanh(Z1)Z2=np.dot(W2,A1)+b2A2=sigmoid(Z2)assert(A2.shape==(1,X.shape[1]))# Values needed in the backpropagation are stored in "cache".# This will be given as an input to the backpropagationcache={"Z1":Z1,"A1":A1,"Z2":Z2,"A2":A2}returnA2,cache
Step 4. Compute the Cost Function
Fitting a Neural Network requires *estimating the unknown parameters which could minimize:
defcompute_cost(A2,Y):"""
Computes the cross-entropy cost given in equation above
Arguments:
A2 -- The sigmoid output of the second activation, of shape (1, number of examples)
Y -- "true" labels vector of shape (1, number of examples)
Returns:
cost -- cross-entropy cost
"""m=Y.shape[1]# number of example# Compute the cross-entropy costlogprobs=logprobs=np.multiply(Y,np.log(A2))+np.multiply((1-Y),np.log(1-A2))cost=(-1/m)*np.sum(logprobs)cost=float(np.squeeze(cost))# makes sure cost is the dimension we expect.# E.g., turns [[17]] into 17assert(isinstance(cost,float))returncost
Step 5. Backward Propagation
To compute dZ1 we need to compute $g^{[1]}\prime \ (Z^{[1]})$
since we defined $a = g^{[1]}(z)$ as the tanh activation function
defbackward_propagation(parameters,cache,X,Y):"""
Implement the backward propagation.
Arguments:
parameters -- python dictionary containing our parameters
cache -- a dictionary containing "Z1", "A1", "Z2" and "A2".
X -- input data of shape (2, number of examples)
Y -- "true" labels vector of shape (1, number of examples)
Returns:
grads -- python dictionary containing your gradients with respect to different parameters
"""m=X.shape[1]# First, retrieve W1 and W2 from the dictionary "parameters".W1=parameters["W1"]W2=parameters["W2"]# Retrieve also A1 and A2 from dictionary "cache".A1=cache["A1"]A2=cache["A2"]# Backward propagation: calculate dW1, db1, dW2, db2.dZ2=A2-YdW2=(1/m)*np.dot(dZ2,A1.T)db2=(1/m)*(np.sum(dZ2,axis=1,keepdims=True))dZ1=np.dot(W2.T,dZ2)*(1-np.power(A1,2))dW1=(1/m)*(np.dot(dZ1,X.T))db1=(1/m)*(np.sum(dZ1,axis=1,keepdims=True))grads={"dW1":dW1,"db1":db1,"dW2":dW2,"db2":db2}returngrads
defupdate_parameters(parameters,grads,learning_rate):"""
Updates parameters using the gradient descent update rule given above
Arguments:
parameters -- python dictionary containing your parameters
grads -- python dictionary containing your gradients
Returns:
parameters -- python dictionary containing your updated parameters
"""# Retrieve each parameter from the dictionary "parameters"W1=parameters["W1"]b1=parameters["b1"]W2=parameters["W2"]b2=parameters["b2"]# Retrieve each gradient from the dictionary "grads"dW1=grads["dW1"]db1=grads["db1"]dW2=grads["dW2"]db2=grads["db2"]# Update rule for each parameterW1=W1-learning_rate*dW1b1=b1-learning_rate*db1W2=W2-learning_rate*dW2b2=b2-learning_rate*db2parameters={"W1":W1,"b1":b1,"W2":W2,"b2":b2}returnparameters
Step 7. Integrate Step 1 - 6 in nn_model()
Build the neural network model in nn_model() by using the functions implemented in Step 1 - 6
defnn_model(X,Y,n_h,learning_rate,num_iterations=10000,print_cost=False):n_x=layer_sizes(X,Y)[0]n_y=layer_sizes(X,Y)[2]# Initialize parametersparameters=initialize_parameters(n_x,n_h,n_y)W1=parameters["W1"]b1=parameters["b1"]W2=parameters["W2"]b2=parameters["b2"]# Loop (gradient descent)foriinrange(0,num_iterations):# Forward propagation. Inputs: "X, parameters". Outputs: "A2, cache"A2,cache=forward_propagation(X,parameters)# Cost function. Inputs: "A2, Y, parameters". Outputs: "cost"cost=compute_cost(A2,Y,parameters)# Backpropagation. Inputs: "parameters, cache, X, Y". Outputs: "grads"grads=backward_propagation(parameters,cache,X,Y)# Update rule for each parameterparameters=update_parameters(parameters,grads,learning_rate)# If print_cost=True, Print the cost every 1000 iterationsifprint_costandi%1000==0:print("Cost after iteration %i: %f"%(i,cost))# Returns parameters learnt by the model. They can then be used to predict outputreturnparameters
Step 8. Predictions
Neural networks are able to learn even highly non-linear decision boundaries, unlike logistic regression
defpredict(parameters,X):"""
Using the learned parameters, predicts a class for each example in X
Arguments:
parameters -- python dictionary containing your parameters
X -- input data of size (n_x, m)
Returns
predictions -- vector of predictions of our model (red: 0 / blue: 1)
"""# Computes probabilities using forward propagation, and classifies to 0/1 using 0.5 as the threshold.A2,cache=forward_propagation(X,parameters)predictions=(A2>0.5)returnpredictions############################################################ Build a model with a n_h-dimensional hidden layerparameters=nn_model(X,Y,4,1.2,num_iterations=10000,print_cost=True)# Plot the decision boundaryplot_decision_boundary(lambdax:predict(parameters,x.T),X,Y)plt.title("Decision Boundary for hidden layer size "+str(4))# Print accuracypredictions=predict(parameters,X)print('Accuracy: %d'%float((np.dot(Y,predictions.T)+np.dot(1-Y,1-predictions.T))/float(Y.size)*100)+'%')# Accuracy: 90%############################################################
Tuning Hidden Layer Size
1
2
3
4
5
6
7
8
9
10
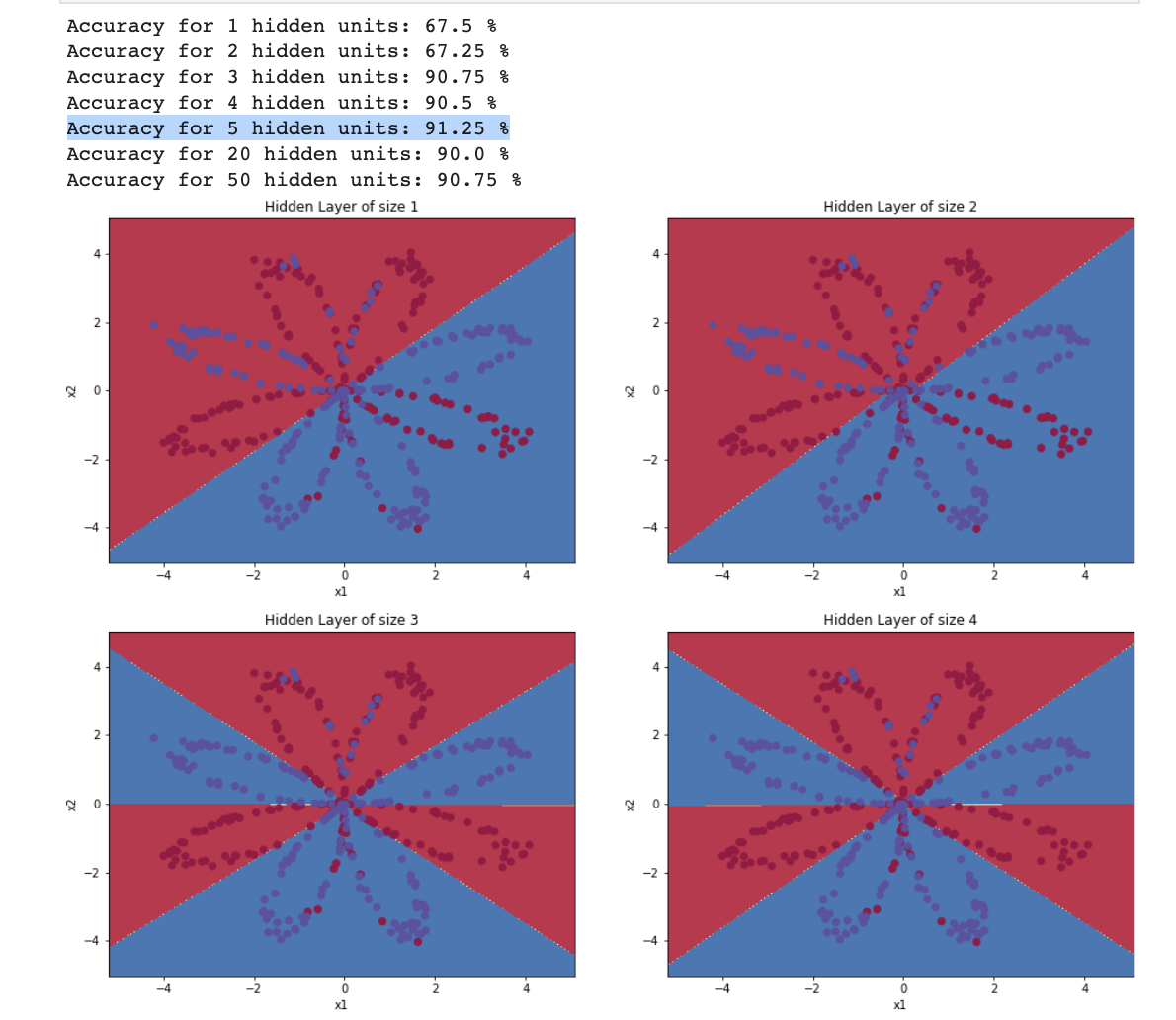
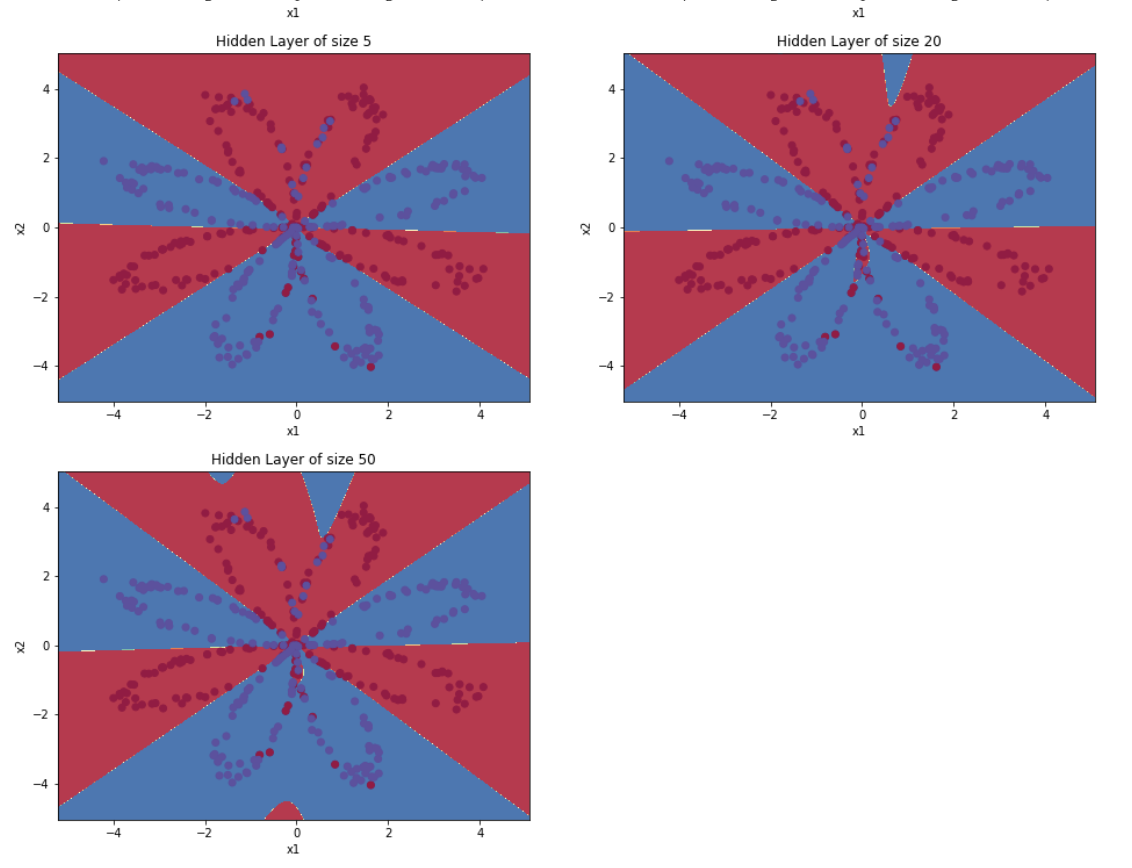
plt.figure(figsize=(16,32))hidden_layer_sizes=[1,2,3,4,5,20,50]fori,n_hinenumerate(hidden_layer_sizes):plt.subplot(5,2,i+1)plt.title('Hidden Layer of size %d'%n_h)parameters=nn_model(X,Y,n_h,1.2,num_iterations=5000)plot_decision_boundary(lambdax:predict(parameters,x.T),X,Y)predictions=predict(parameters,X)accuracy=float((np.dot(Y,predictions.T)+np.dot(1-Y,1-predictions.T))/float(Y.size)*100)print("Accuracy for {} hidden units: {} %".format(n_h,accuracy))
Output:
Interpretation:
The larger models (with more hidden units) are able to fit the training set better, until eventually the largest models overfit the data.
The best hidden layer size seems to be around n_h = 5. Indeed, a value around here seems to fits the data well without also incurring noticeable overfitting.